Kakute H7
Kakute H7 stores PX4 parameters on its SD card, so you have to have an SD card inserted all the time!
Kakute H7 does not have an internal magnetometer
Bootloader flashing
Kakute H7 comes with BLheli bootloader, we need to reflash it to PX4 bootloader Get the bootloader here: holybro_kakuteh7_bootloader.hex
You need to use older version of Betaflight Configurator, otherwise you will get an error.
Version 10.7.2 is verified and working.
Download here - https://github.com/betaflight/betaflight-configurator/releases/tag/10.7.2
Follow the guide here: https://docs.px4.io/main/en/advanced_config/bootloader_update_from_betaflight.html to flash the PX4 bootloader using the betaflight configurator.
PX4 firmware
You have to flash the bootloader first, otherwise these steps will not work!
Firmware - 1.16.1, with UART fix (remove line: nuttx-config/nsh/defconfig:212:CONFIG_USART3_SERIAL_CONSOLE=y)
- Get the firmware here: https://drive.google.com/drive/folders/1iKcHzFtSHZB_lsj_gT5sN wbiLho4amIe?usp=drive_link
Before loading the px4 firmware, you need to flash the bootloader first.
Use QGroundControl to flash the Firmware.
Once flashed, you have to apply these parameters throught QgroundControl:
- set frame to generic quadcopter, restart
- BAT1_A_PER_V: 59.5
- BAT1_V_DIV: 11.2 - these 2 params will make the battery voltage readout work
- CBRK_SUPPLY_CHK: 894281 - this will fix the "avionics power low" error
- IMU_GYRO_RATEMAX: 400Hz - this will fix low rate of mavros messages is ROS
- SYS_HAS_MAG: 1 - this will endable magnetometer (if you use GPS)
- EKF2_MAG_TYPE: Automatic - this will endable magnetometer (if you use GPS)
Reboot the vehicle and continue with the setup:
- calibrate all sensors, Radio, and setup flight modes
- In Power, set 4 cells and check that voltage readout works
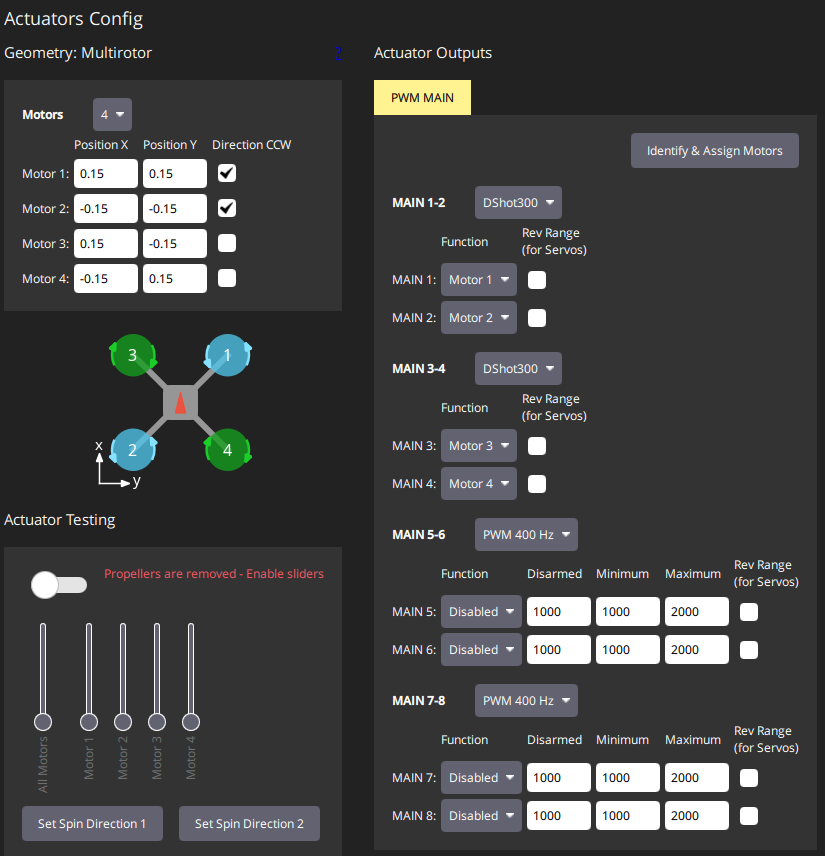
- In Actuators, setup all motors to Dshot 300, and configure the frame shape
- In PID tuning, reduce the rate gain K for roll and pitch to 0.7, and Attitude P gains for roll and pitch to 6
Problem with missing magnetometer data
- On one kakute H7 1.5, problem with missing mag data was fixed by removing the usleep delay on the SD card config.
Building the bootloader yourself (advanced, not needed for RoboFly):
- Clone the px4_firmware repo and in its root directory
- call:
make holybro_kakuteh7_bootloader - A build directory will be created, and the bootloader will be in build/holybro_kakuteh7_bootloader.
- You need to convert the .elf binary to .hex: `arm-none-eabi-objcopy -O ihex ./holybro_kakuteh7_bootloader.elf holybro_kakuteh7_bootloader.hex
Compiling the firmware yourself (advanced, not needed for RoboFly):
- Clone the px4_firmware repo and in its root directory, call:
- call:
make holybro_kakuteh7_default - A build folder will be created with you firmware
To get Mavlink working both ways on T3/R3 (ttyS2 on sd card):
firmware/boards/holybro/kakuteh7/nuttx-config/nsh/defconfig:
- remove line:
nuttx-config/nsh/defconfig:212:CONFIG_USART3_SERIAL_CONSOLE=y - compile and load the FW, now Mavlink should run on R3/T3 both ways!